З бурхливим розвитком електронної промисловості визначення положення деяких структурних компонентів повільно змінюється від початкового контактного вимірювання до безконтактного вимірювання черезДатчик положення Холла і магніт. Як ми можемо вибрати відповідний магніт відповідно до нашої продукції та структури? Тут ми проводимо простий аналіз.
Спочатку нам потрібно визначити матеріал магніту. В даний час самарій-кобальтовий магніт і неодим-залізо-бор широко використовуються в датчиках положення Холла. Основна відмінність між двома магнітами полягає в тому, що на основі того самого об’єму магніт NdFeB є сильнішим, ніж самарій-кобальтові магніти; теплова екскурсія самарієвого кобальту менша, ніж у Nd-Fe-B; стійкість до окислення самарієвого кобальту сильніша, ніж у Nd-Fe-B, але, як правило, на зовнішній стороні магніту є покриття, яке може вирішити проблему окислення; самарієвий кобальтовий магніт має кращу термостійкість, ніж магніт NdFeB, але значення температурного опору для обох магнітних матеріалів може досягати більше 200 ℃. Тому, вибираючи тип магніту, ми повинні оцінювати його в поєднанні з вартістю, робочою температурою та робочим середовищем. Загалом NdFeB можна використовувати більше, головним чином тому, що він має найкращі характеристики магнітного поля. Однак при роботі в широкому діапазоні температур рекомендується вибирати самарієво-кобальтовий магніт через його невеликий тепловий дрейф.
Крім того, нам потрібно визначити деякі основні параметри магніту. Згідно з інформацією про тестове положення та напрямком руху об’єкта, ми визначаємо, чи є напрям намагніченості магніту діаметральним чи осьовим. Крім того, визначається, чи потрібно вибрати aквадратний магнітабо aциліндровий магнітвідповідно до конструкції установки. Звичайно, іноді нам потрібно налаштувати форму магніту відповідно до структури. Існує ще один фактор вимоги до магнітного потоку, який завжди був для нас при виборі магніту. Насправді нам потрібно проаналізувати його в таких двох аспектах:
1. Напруженість магнітного поля, індукованого самим датчиком положення Холла, і діапазон індукованого магнітного поля в кожному напрямку будуть чітко позначені в книзі даних датчика.
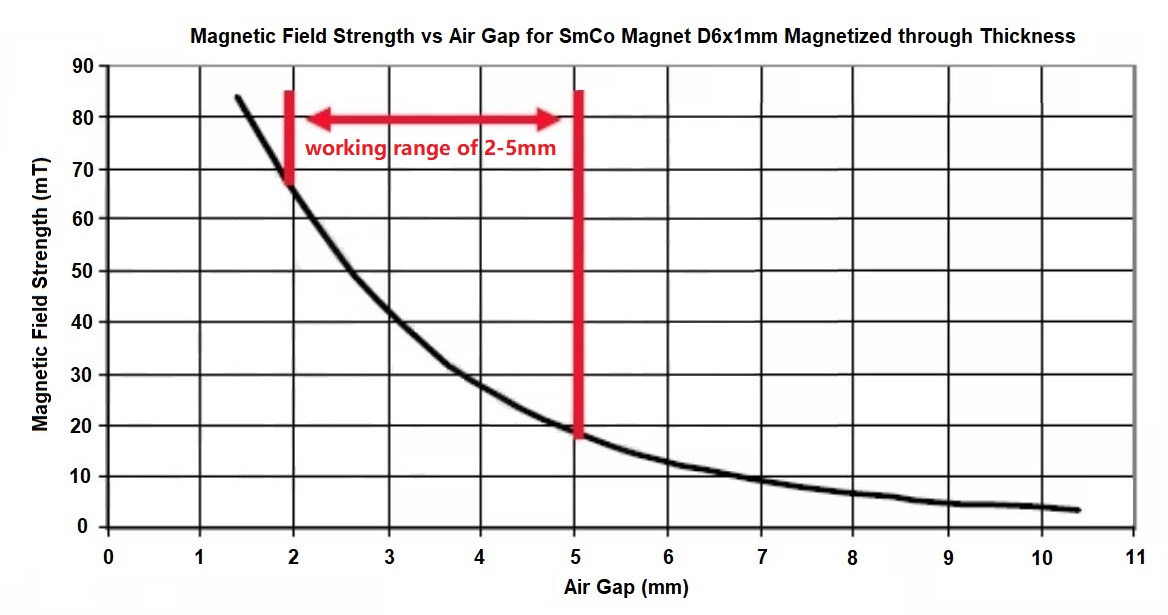
2. Відстань між магнітом і самим датчиком зазвичай визначається структурою продукту. Відповідно до двох аспектів вище та кривої зміни магнітного поля на малюнку нижче як приклад, ми можемо визначити напруженість магнітного поля необхідного магніту.
Нарешті, ми повинні розуміти, що це не означає, що магніт може бути так далеко від датчика, якщо магнітне поле відповідає діапазону вимог датчика. Хоча сам датчик має функцію калібрування, ми повинні розуміти, що коли магніт знаходиться занадто далеко від датчика, розподіл самого магнітного поля важко забезпечити лінійність або близькість до лінійності. Це означає, що зі зміною положення та нелінійним розподілом самого магнітного поля вимірювання датчика стане складним, а калібрування стане дуже складним, так що продукт не матиме відновлюваності.
Вище наведено лише простий аналіз вибору магніту в додатках датчика Холла. Ми сподіваємося, що це буде вам корисно. Якщо у вас виникнуть інші запитання під час процесу розробки, зв’яжіться з нами,Ningbo Horizon Magnetics. Ми можемо налагодити подальший зв'язок і надати вам технічну підтримку.
Час публікації: 12 серпня 2021 р